Control
현장을 지휘하다
이기종 로봇과 설비를 통합 제어하여 물류 효율을 극대화합니다.
Integrated control of heterogeneous robots and equipment for maximized logistics efficiency
TAMS Overview
로봇을 한 대씩 움직일 수는 있습니다.
그러나 수백 대가 엉키지 않고 하나의 흐름으로 움직이려면, 지휘가 필요합니다.
TAMS는 다수·이기종 로봇과 설비, 작업 흐름까지 통합 조율해 교착을 막고
물류 현장의 전체 효율을 최적화하는 통합 관제 시스템입니다.
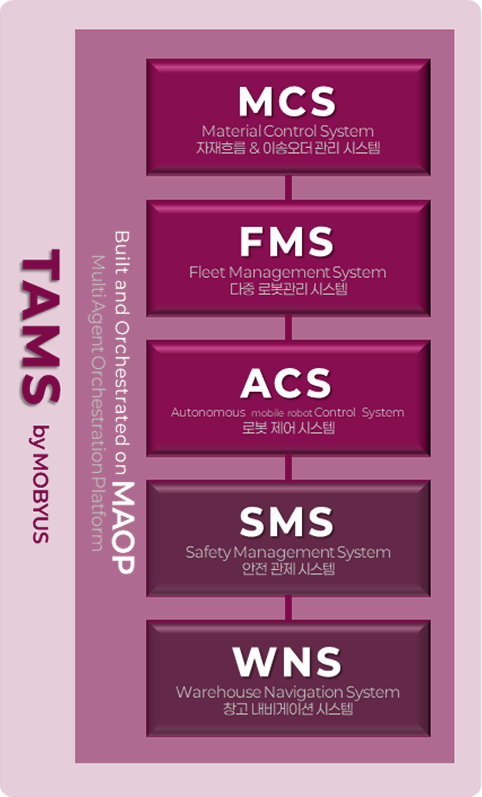
(Multi Agent Orchestration Platform)
Why TAMS
현장에서 마주치는 문제
| # | 문제 | 설명 |
|---|---|---|
| 1 | 혼재 | 다량의 로봇/기기가 혼재 — 개별 관리 불가 Multiple robots & devices coexist — unmanageable individually |
| 2 | 교착 | 기기간 교착(Deadlock) Inter-device deadlocks — line stoppage |
| 3 | 충돌·대기 | 로봇/설비 간 충돌 및 대기 Collisions & queuing — efficiency loss |
| 4 | 분산제어 | 시스템별 분산 제어 Siloed control per system — no global optimization |
TAMS의 답
TAMS Suite
- 공장/창고 내 피킹/적치 전략과 이송 요청(TransferRequest) 매핑
- 이송 요청에 대한 최적 이송 오더 생성 (최적화 엔진 탑재)
- 자재 흐름 통합 관리, 실시간 재고관리
- 다수(1000대 이상), 다기종(10여종 어댑터)의 유무인 군집 관리 (이송오더 할당, 동작제어, 설비제어, 최적화 자동교통 제어)
- 하위 연관설비 제어 (엘리베이터, 리프트, 스피드 도어 등)
- 에이전트 기반 시뮬레이션
- 3D 로봇 관제 (로봇 언어로 이송오더 변환)
- 현장 상황 반영(초 단위) 우선 순위 교통 제어
- 산업용 프로토콜 게이트웨이 탑재 (PLC, 설비, IoT 등 제어)
- 공장/창고 내 충돌 및 사고 방지
- 유무인 혼합 작업 환경 실시간 위험 제어
- 중대 재해 예방 위한 제어로직 탑재
- 작업자 위치기반 내비게이션 및 협업 관리
- 공장창고내 총량/박스 피킹 및 분류
- 공장창고내 최적 경로 가이드
핵심 역량
| # | 역량 | 설명 |
|---|---|---|
| 1 | 대규모 동시제어 | 1000대 동시접속 (1초 내 대응), Microservices 기반, 메모리 캐시(Message Queue) |
| 2 | 이기종 통합 | 자사 로봇 + 타사 AGV + 유인지게차 + 청소로봇 혼재 환경 통합 관제 |
| 3 | AI 운송 최적화 | AI 기반 물동 사전예측, 군집 이동 최적화(스케줄링·할당), 경로 최적화(혼잡 우회) |
| 4 | Realtime 실행 | 중앙 3D 관제 포털, Mobile/키오스크 UI, 플랫폼 기반(UI 개발/CAD) |
| 5 | 분석·KPI | 관리자 분석툴, KPI 대시보드, 운영 최적화 인사이트 |
| 6 | 유연한 플랫폼 | MAOP 기반 유연한 개발, 다양한 구축 지원 플랫폼 |
| 7 | 안정성 | 이중화 아키텍처, 무중단 운영 구조 |
MCS — Material Control System
자재흐름제어시스템
자재 흐름과 이송 오더를 관리합니다
Manages material flow and transport orders
상위 시스템(WMS, MES, ERP)에서 내려온 작업 요청을 이송 오더로 변환하고, 자재의 출발지·목적지·우선순위를 판단하여 최적의 실행 계획을 수립합니다
Converts work requests from upper systems (WMS, MES, ERP) into transport orders, determines origin/destination/priority, and creates optimal execution plans
① 이송 오더 생성·유연화 ② 최적 이송계획 수립 (VRP 기반) ③ 상위 시스템 연동 (ERP·MES·WMS·OMS)
① Flexible transport order generation ② Optimal plan (VRP-based) ③ Upper system integration
생산 라인에서 부품 공급 요청 → MCS가 가장 효율적인 로봇과 경로를 할당
Production line requests parts → MCS assigns the most efficient robot & route
FMS — Fleet Management System
다중 로봇관리 시스템
다수의 유·무인 기기를 동시에 관리하고 제어합니다
Manages and controls multiple manned/unmanned fleets simultaneously
MCS에서 생성된 이송 오더를 수행하기 위해 다수(1000대 이상), 다기종의 로봇과 유인 지게차 등을 군집 제어하며 교통의 혼잡, 교착을 예방합니다
Fleet-controls various types of robots (300+) to execute transport orders from MCS, preventing traffic congestion and deadlocks
① 대규모 군집 제어 (1000대 이상) ② 이기종 통합 관제 (자사/타사 AGV 혼재) ③ 엘리베이터/도어 등 하위 연관설비 제어
① Large-scale fleet control (300+) ② Heterogeneous integration (own/3rd party AGVs) ③ Lower-level equipment control (Elevators/Doors)
로봇 100대가 좁은 통로를 지나갈 때 충돌 없이 최적 경로로 이동하도록 제어
Controls 100 robots to navigate narrow aisles cleanly without collision
ACS — AMR Control System
로봇 제어 시스템
로봇의 개별적인 움직임을 정밀하게 제어합니다
Precisely controls individual robot movements
각 로봇이 지시받은 경로를 따라 안전하고 정확하게 이동하도록 휠 모터, 센서 등을 직접 제어하며 현장의 장애물을 실시간으로 인지·회피합니다
Directly controls wheel motors and sensors for safe/accurate movement along designated paths, recognizing and avoiding obstacles in real-time
① 3D 로봇 관제 및 로봇 언어 변환 ② 초 단위 우선순위 교통 제어 ③ 산업용 프로토콜 게이트웨이 탑재 (PLC, 설비, IoT 등)
① 3D robot monitoring & language conversion ② Priority traffic control per second ③ Industrial protocol gateway (PLC, IoT, etc.)
로봇 주행 중 예상치 못한 적재물 발견 시, 스스로 우회 경로를 생성하여 이동
When an unexpected pallet appears in the path, the robot automatically navigates around it
SMS — Safety Management System
안전 관제 시스템
공장/창고 내 작업자와 로봇의 안전을 보장합니다
Ensures safety for workers and robots in the facility
유무인 혼합 환경에서 위험 요소를 실시간으로 제어하고 중대 재해를 예방하는 제어로직을 구현합니다
In mixed manned/unmanned environments, it controls risk factors in real-time and implements control logic to prevent severe accidents
① 공장/창고 내 충돌 방지 ② 유무인 혼합 작업 환경 실시간 위험 제어 ③ 중대 재해 예방 자동 정지
① Collision prevention ② Real-time risk control in mixed zones ③ Auto-stop for severe accident prevention
지게차와 작업자가 교차하는 구간에서, 로봇과 지게차의 위치를 파악하여 충돌 전 로봇 감속/정지
Detects intersecting forklifts and workers to decelerate/stop the robot proactively
WNS — Warehouse Navigation System
창고 내비게이션 시스템
작업자 위치 기반 최적 경로 가이드를 제공합니다
Provides optimal route guides based on worker locations
창고 내 작업자의 동선을 최소화하고 피킹/분류 작업을 원활하게 수행할 수 있도록 내비게이션 기능과 협업 관리를 지원합니다
Supports navigation and collaboration to minimize worker travel distance and facilitate smooth picking & sortation tasks
① 작업자 위치기반 내비게이션 및 로봇-작업자 협업 관리 ② 창고 내 총량/박스 피킹 및 분류 가이브
① Worker-location-based navigation & robot-human collaboration ② Box/Carton picking and sortation guides
대형 물류센터에서 작업자가 PDA 화면을 통해 다음 이동할 보관 위치와 최단 경로를 안내받음
In a large distribution center, workers receive turn-by-turn guidance to the next bin via PDA
경쟁력 비교
| 항목 | MOBYUS TAMS | 경쟁사 A | 경쟁사 B |
|---|---|---|---|
| 자동 교통제어 동시 수 | 1000대 이상 | 80대 이하 | 50대 |
| 오더 최적화 | VRP (Multi-Pick, Multi-Drop) | Single-Pick, Single-Drop | TSP (Single-Pick, Multi-Drop) |
| 교통제어 지원 | 5종 | 1종 | 2종 |
| 지원 맵 종류 | 4종 | 2종 | 2종 |
| 다기종/유무인 구축사례 | 5건 / 2건 | 0건 | 0건 |